Tracklet Output Specification#
This is a main message which includes all the output results during runtime of AkiraKan fusion box. This message will be sent out for each received LiDAR data frame (10Hz).
Communication Specification#
Item |
Description |
|---|---|
Communication Protocol |
TCP (ZeroMQ SUB CONNECT) |
Data Encoding |
FlatBuffers v2.0.0 |
Output Port |
8050 |
TrackletsPacket#
Field |
Unit |
Data type |
Description |
|---|---|---|---|
frame_id |
- |
uint16 |
ID / index of the LiDAR frame / scan. It is incremented every time the sensor completes a rotation, crossing the zero azimuth angle. |
count |
- |
uint16 |
Object count in the current frame. |
lidarts_ms |
ms |
float64 |
Timestamp from Ouster LiDAR Time Source. If not synchronize to PTP time source: monotonically increasing counter that will begin counting milliseconds since startup. If synchronize to PTP time source: As soon as a PTP sync event happens, the time will be updated to unix timestamp (milliseconds since 1970). The counter must always count forward in time. If another PTP sync event happens the counter will either jump forward to match the new time, or slow itself down. |
unixts_ms |
ms |
float64 |
Unix timestamp (milliseconds since 1970) from AkiraKan fusion box |
tracklets |
- |
[Tracklet] |
Vector of tracklets in the current frame |
Tracklet#
Field |
Unit |
Data type |
Description |
|---|---|---|---|
track_id |
- |
uint64 |
The ID of the object being tracked |
class_id |
- |
ClassType (uint8) |
Classification of the object |
confidence |
- |
float32 |
Probability of the confidence of classification result. Values: [0, 1] |
bbox |
- |
Bounding box of the object |
|
zone_ids |
- |
[uint16] |
Vector of zones occupied by the object |
ClassType#
Class |
Enumeration |
Data type |
|---|---|---|
LargeVehicle |
0 |
uint8 |
SmallVehicle |
1 |
uint8 |
Cyclist |
2 |
uint8 |
Pedestrian |
3 |
uint8 |
BoundingBox#
Field |
Unit |
Data type |
Note |
|---|---|---|---|
position |
meters |
Vector3 (float32) |
XYZ position of the bounding box in the World Coordinate Frame |
velocity |
m/s |
Vector3 (float32) |
XYZ velocity of the object |
dimension |
meters |
Vector3 (float32) |
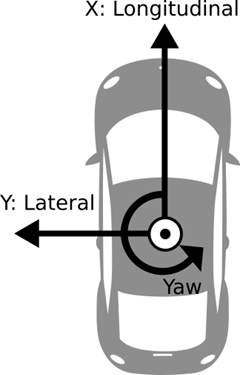
x: Longitudinal |
yaw |
radians |
float32 |
Bounding box rotation angle along the Z-axis from the positive X-axis |
The World Coordinate Frame follows the Right Hand Rule convention. The ground plane aligns along the X-Y plane and Z being altitude.
Vector3#
Field |
Unit |
Data type |
|---|---|---|
x |
meters |
float32 |
y |
meters |
float32 |
z |
meters |
float32 |